2017国際ロボット展に出展しました
2017国際ロボット展が東京ビックサイトで開催され(2017年11月29日(水)~12月2日(土))、「さがみはら HSR社会実装研究会」として出展、参画団体としてさがみはらIT協同組合メンバーが対応しました。

2017国際ロボット展看板
来場者数は主催者発表で130,480名。
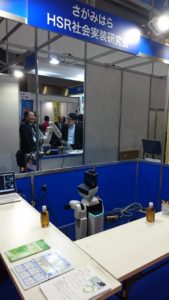
出展ブースの様子
テレビ神奈川(TVK)の取材が入り、当組合 組合員 株式会社メディアプラス 金沢氏がインタビューに応じました。

TVK取材に応じる金沢氏
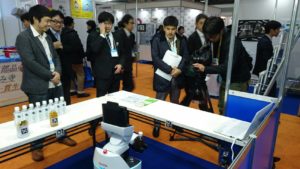
TVKがHSRを録画する様子
【HSR動作デモ概要】
①待機モード
お客さんがいない時は待機モードで動作。ARマーカ検知※1と自律移動※2を利用し、テーブル上のものを移動させてお客さんを待ちます。
②お客さんの検知
待機モード中の一連の動作中に、人物位置推定※3を利用し、お客さんがHSR展示ブースに訪れたことを検知します。
③遊びモード
「じゃんけん」「あっち向いてホイ」をして、お客さんと遊びます。ハンドジェスチャー検知※4を利用し、HSRに向かって手を見せることで遊ぶことができます。
④遊び終了
ARマーカ検知※1と自立移動※2を利用し、お客さんにお土産を渡します。
【技術詳細】
※1 ARマーカ検知 (HSR標準提供)
2台のカメラ(ステレオカメラ)で画像処理を行い、ARマーカを認識。視差を計算することでARマーカまでの距離を推定し、3D空間上にマッピングする技術
※2 自律移動 (HSR標準提供)
目標を指定すると、障害物を回避したルートを計算、台車・関節を自動制御する技術
※3 人物位置推定 (自社開発)
HSRに搭載されている「RGB-Dカメラ」を利用し、「カラー画像」に対して人物顔領域を算出。「深度画像」から人物顔領域を切り出し、人物までの距離を推定し、3D空間上にマッピングする技術
※4 ハンドジェスチャー検知 (自社開発)
「深度画像」から、じゃんけん用の手型認識と、あっち向いてホイ用の手指方向検出を実装。
展示会中は、毎日100以上の来場者にブースに御訪問頂き、HSRと触れ合い・楽しんでもらうことで、展示会出展の目的である「親しみやすいロボットとする研究」の成果を確認することができ、有意義な展示会出展となりました。